
Bu yazıda enlem ve boylamı hesaplayabildiğimiz kilometre taşı olan kronometre-sextant ikilisinden akıllı telefonumuza tıklamaya kadar olan sürece göz atacağız. Tıklamaya ulaşmak hiç de kolay olmadı, hep beraber bakalım.
Lodestone’dan günümüze, “celestial navigasyon”a kadar olan kısmından geçen yazıda bahsettim. Bahsettim diyorum, çünkü antik zamanlardan elektronik navigasyon biz sivillere açılana kadar, binlerce yıllık süreci üç beş sayfayla anlattığımı söylemem terbiyesizlik olur. Değindiğim her aşama eğer ilginizi çektiyse, Mr veya Miss Google’a sorarsanız, sizin önünüze megabyt’larca ilginç bilgiler dökecektir. Bu yazıda enlem ve boylamı hesaplayabildiğimiz kilometre taşı olan kronometre-sextant ikilisinden akıllı telefonumuza tıklamaya kadar olan sürece göz atacağız. Tıklamaya ulaşmak hiç de kolay olmadı, hep beraber bakalım. Navigatör veya kaptanın kamarasında gözü gibi korunan, her gün aynı saatte, aynı şekilde kurulan, büyük aktör, çığır açan kronometre, zamanla cebe girecek kadar küçüldü. O zamana kadar gemilerde güvenilen en hassas saatler kum ve su saatleriydi. 1530’da gemiye giren kronometrenin yanı sıra Britanya Kraliyet Bahriyesi kum saatini 1839’a kadar kronometrenin ayarlanmasında kullandı. Kaptan Cook’un, Harrison’un gemi kronometresi ile sextant’ın ortaklığı sayesinde enlemiyle boylamıyla “tam”a yakın mevki koyarak dünyayı dolaşmasıyla keşifler çağı patladı. (Tama yakın demem, Cook’un sextant’la açık denizde koyduğu mevki yeterliyse de hata payı resifler arasında, Endevour’un karinası Great Barrier Reef’inde birkaç resifi ziyaret etti). Denizci devletler, güçlü donanmalarıyla denizlere hâkim olup, cihana hâkim olma yarışına başladı. Ufacık Hollanda’nın, “VOC” East India şirketi tek başına, Avrupa kadar alana yayılmış olan Endonezya’yı istila etti. Atlantik’in karşı kıyısında da, Amerikalar keşfedilip hazineler paylaşılırken, Papa kavga etmesinler diye araya girip “Yeni Dünya”yı İspanya ile Portekiz arasında ikiye böldü. Bu sırada gücünün zirvesindeki Osmanlı Padişahı Kanuni, haremde meşguldü. Aklıma geldikçe illet oluyorum da neyse biz gerilemeye değil de ilerlemeye bakalım.
Seyir ışıkları – 1838: 1838 yılında seyir ışıkları ABD öncülüğünde denizlerde trafiğe yardımcı olmaya başladı. Gemilerde kırmızı ile yeşil ışığın nerede olacağında dünya hemfikir oldu, ama liman girişlerindeki kanal şamandıralarının ve ışıklarının renklerinde aynı fikirde değiller. (Tüm dünyada, limana giriş yönünde yeşil ışık ve şamandıralar sancağımızda kalacak şekilde düzenlenmiştir. Amerika kıtasındaki devletler ve Japonya ABD’yi takip ederek dünyanın gerisine terstir. ABD ve yukarıdaki ülkelerde limana dönüşte “red, right, return” tekerlemesiyle kırmızıyı sancağımızda bırakırız.) “LOP (line of position)” (üzerindeki bir noktada olduğumuz pozisyon çizgisi)… “Fix” veya “Pozisyon” için, ister kıyı seyrinde, ister astronavigasyonda, iki, tercihen daha fazla LOP kesiştirilir. Hatayı azaltmak için LOP hatlarının mümkünse birbirine dik açıya en yakın olanlarını seçeriz. (Kâğıt harita üzerinde kurşun kalemin kalınlığının size kaça patlayabileceğini tahmin edemezsiniz.) Gök cisimlerinden hesapladığımız LOP’ler aslında birer eğridir ama biz çizgi olarak kabul ederiz. Üç LOP şansımız varsa oluşturduğu üçgenin merkezindeki nokta “Fix”tir. Buna “Triangulation” (üçgenleme), en az üç belirgin noktadan, burun, fener, gök cisminden hesaplama diyoruz.
HARİTALAR
Navigatör sanatını icra ederken hesapladığı pozisyonunu, X enlem, Y boylam olarak bulduğu noktayı üzerine koyacak bir haritası yoksa, elinde rakamlar dizisinden başka bir şey yoktur. Bulduğumuz pozisyonumuzu, rotamızı “plotladığımız” deniz haritalarının akıllı telefona girene kadar evalüasyon serüvenini unutmayalım. Bugün elimizdeki veya kokpitte önümüzdeki cihaz kestirmeden nerede olduğumuzu, küçük gemimizi oraya koyarak gösteriyor; harita dilinde oranın nere olduğunu sorarsanız söylüyor; problemin cevabından suale gitmek gibi. Oysa daha önce navigatör (mevki bulma, rota hesaplama ve plotlama) sanatını, yaptığı gözlemin neticesi olan mevkie kadar kullanıyordu. Navigasyon sanatı, yukarıdan gelen kesin neticelerle navigasyon ilmine dönüştü. Solomon Adaları’ndan Avustralya’ya giderken Yeni Gine’den geçeceğiz. Elimde bu bölgeye ait iki genel haritanın kopyası var, üzerlerinde çok kullanıldığından, inadına kritik yerlerden katlanma izi, bu leke sinek kakası mı yoksa resif mi karmaşası yanında, iki harita iki değişik bilgi de veriyor. Üçüncü gün Woodlark Adası’na yaklaşıyoruz, rüzgâr kafadan B-GB sert 30-35. Elimdeki haritaların aynı fikirde olduğu bir koyu gözüme kestirdim. SATNAV fix verdi, nerede olduğumu biliyorum ama haritadaki koya yaklaştığımda koy değil düz duvar bir kıyı! Akşam oluyor, resifler arasında gece dolaşmak Rus ruleti gibi bir şey. Adanın kuzeyine tırmanıp açık okyanusta geceleyeceğim, sabah bir yer bulacağız, neredeyse adanın kuzey burnuna geldik. Radar bayağı derin bir girinti gösterdi. Hemen rotayı çevir, o zamanki tayfa Jackie bastonda, yavaş yavaş girip şahane küçük bir koyda bembeyaz kum üstüne demiri bıraktık. Mutlu sonu kıyıdaki yemyeşil cangıl önünde birayla kutlarken, haritada olmayan koya Kelebek Koyu adını verdim (sahibi varsa söylesin geri alayım). Burada verdiğim örneklerde (Mertlik bozuldu, biz ne maceralar yaşadık muhabbeti yapmıyor, haritanın önemini belirtmek istiyorum, denizde mertlik yapılacak daha çoook alan var bence). O devirdeki navigatör çoğu zaman rotasının sonunda kara olduğundan da emin değildi. Elinde doğru harita olmazsa navigasyon sanatı pencereden dışarı. Taa Cook’tan kalmış haritalar ticari değeri olmayan mevkilerde, limanlar kadar update olmuyordu. (2000 yılında Meksika’nın doğu kıyısında güneye iniyoruz. Artık bizim de GPS’imiz var ve oradan buradan kopya, bilgisayarımızdaki haritalara GPS’i bağlamıştık. Espiritu Santo resifindeki dar bir geçitten gireceğiz. Bilgisayar ekranında bizim küçük gemi resifin üstünde, bazen de öbür tarafında gidiyor. Kelebek’teki en doğru cihaz bizim gözler, resifte kırılan denizi takip ederek demir yerine girdik. Bu tipik bir örnek. (Borneo’da da nehirdeyken karada gidiyor gözüküyorduk) bizim mevki doğru ama harita yanlış. Bir koya girişte bugün de GPS’de “track” iz bırakırım, dönüşte gece acil kaçmak zorunda kalırsak o iz isterse karada gözüksün bizi selamete çıkarır. Ptolemy’den başlayan ilk haritalar navigatöre özel jurnallerken, haritacılar kâşiflerin parça parça portolan çizimlerini birleşmenin yollarını aradılar. Yerküremizi masaya yatırmak imkânsız (Dünya düz olsaydı işler çok daha kolay olacaktı). 1569’da Gerardus Mercator ilk dünya haritasını kürenin etrafına Ekvator’a teğet sardığı kâğıt silindir üzerine merkezinden projeksiyonla yaptı. Bu harita 18. yüzyıldan itibaren her navigatör tarafından kullanılmakta. Merkator projeksiyonun daha çok trafik olan, orta enlemlerde kullanılması pratik, ama dikkat edersek ekvatordan uzaklaştıkça haritanın kenarındaki enlemlerin arası gittikçe açılmakta, Rusya ile Kanada gittikçe büyümekte, Arktik ve Antarktik, haritaların altında veya üstünde boydan boya uzanmakta. Bu anormal prezantasyonu mantıki bir şekle getirmek için kuzey yarım kürede Gnomonic projeksiyon (kâğıdı önemli enlem üzerine teğet olacak şekilde konik sararak) yapıldı. Bu ortaokul coğrafyasında öğrenip beynimizin raflarında bir yere kaldırdığımız bir bilgi ama GPS öncesi, kuzey Atlantik’i en kısa yoldan geçmek istediğinizde “Rhumb line” değil “Great circle” (kürenin üzerinde rotamız tanjant olarak sarılmış Gnomonic haritayla seyir diyebilirim) seyri yapacak şekilde rotanızı planlamanız gerekirdi. Bugün sanırım Mr. Garmin, Mr. Navionics, her kim sizin chartplotter’de oturuyorsa sizin için o rotayı çizer. Kuzey enlemlerde Atlantik’i batıdan doğuya geçerken bir kere Gnomonic projeksiyon haritası kullanmıştık, harita üzerinde en kısa rota aynı uçakların rotasında gördüğünüz gibi bir eğri olarak plot edilebiliyor. New York’taki ana seyir bölgem, Long Island Sound, 100nm civarında, Gökova Körfezi gibi iki kıyısı da marin aktivitelerinin yoğun olduğu rekreasyonal bir iç deniz. Mazot aldığım kıyıdaki Texaco istasyonlarında kara yol haritaları gibi Long Island Sound’un haritasını veriyorlardı. ABD haritalarında copy right yoktur, istediğin gibi kullanırsın. Bu haritada texaco istasyonları ve o istasyonlara rotalar verildiği gibi, hemen hepsi güzel olan ve tarihi fenerlerin resimlerini koymuşlardı. ABD’de birbirine yakın çok fener arasında benim aradığım feneri resminden doğrulamak kolaylıktı. Arkadaşlar dalga geçse de ben o haritayla çok seyirler yaptım. (İngilizce karada kullanılan “Map” denizde kullanılan “Chart”dır, değişik bilgiler verirler. Deniz raconunda “map” demek ayıptır.) Bana yol gösteren harita, başımın üstündeki haritadır, Polinezya’da Bora Bora ve Huahine adalarına kartpostaldaki havadan çekilmiş fotoğrafla girmiştim. Zaman geldi Sumatra Adası’nın kuzey ucundaki Plau We Adası’nda durup mazot almak istediğimde aynı rotada seyreden bir arkadaştan VHF’yle belirli burunların koordinatlarını alarak haritamsı şeyi kendim çizmiştim. Eski portolonlar da böyle bir şeydi. 1635’te Henry Gellibrand tespit ettiği yıllık manyetik varyasyonu haritalarda pusula gülünün üstüne koyarak çok önemli bir aşamaya imza attı. Ana Meridyen – 1884: Dünyamız bildiğimiz gibi 360° meridyene/boylama bölünmüştür. 180° Batı ve 180° Doğu. Başlangıç yani Greenwich’ten geçen meridyen uluslararası 0° 1884’te kabul edilmiştir. 0’ın nereden geçtiği dünyanın dönmesini hiiiç etkilemez, sadece politik bir üstünlük. Fransızlar Paris’i 0° kabul eden haritalar bastılar bir süre, hatta Sukarno’nun egosu 0°’yi Jakarta’ya koydu. Gyro Pusula – 1885: 1885’te icat edilen gyro pusula Hermann Anschütz-Kaempfe tarafından 1906’da mükemmelleştirildi. Gyro prensibi, bir tekerleği, dik, yatay ve dönme ekseni ortasında “gimbal”layarak (dört yönlü yalpadan arıtılan mekanizma) bir motorla döndürürsek, “gyroscopic inertia” (cayro ataleti) motor durmazsa sonsuza kadar döner ve dönme ekseni üzerinde sabit kalır. Cayro pusulanın dönüş ekseni meridyene ayarlanır, böylece daima dünyanın ekseni yani hakiki kuzeyi gösterir. Manyetik pusula gibi harici manyetik alanlardan (Dünyanın ve de geminin çelik yapısından) etkilenmez. Böylece navigatör dünyamızın ve gemisinin manyetik sapmalarını “variation ve deviation” hesaplamaktan kurtuldu.
RADYO NAVİGASYONU
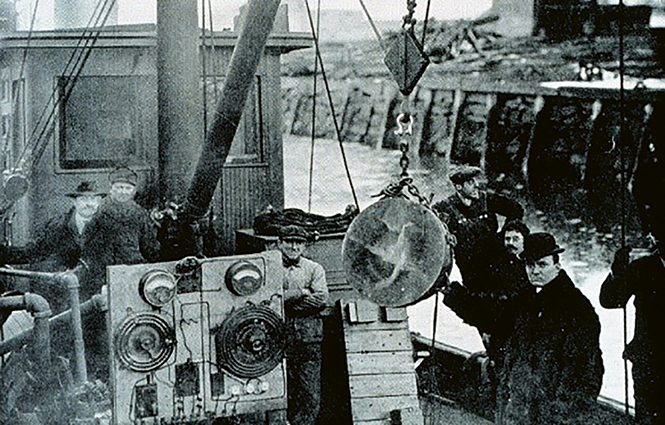
RDF (Radyo Direction Finder) – 1906: 1891 yılında telsiz telgraf gemilerde görülmeye başladı. 1899’da R.F. Matthews telsizle yardım isteyen ilk gemi oldu. 1904’te Hawaii, Honolulu, BBC gibi radyolardan verilen saat ayarı sinyalleri ile gemilerde kum saati ile ayarlama devri bitti. “UTC” Greenvich mean time’a göre saat ayarı günde birkaç defa yapılırdı. Radyo sinyallerine “homing” (sinyalin geldiği yöne kilitlenme) üzerinde İngiliz Sir Oliver Lodge, Fransız Andre Blondel, Amerikalı De Forest ve Stone, İtalyan Bellini ve Tosi çalışıyordu. Stone Radio&Telegraph şirketi 1906 yılında US Navy kömür gemisi Lebanon’a prototip RDF radyo direction finder monte etti. Radyo sinyalleri ufkun üzerinde çok uzun mesafelere kadar uzanıyor. RDF ile radyo sinyali veren kaynağın yönünü bulmak için, cihazın üzerindeki directional anteni çevirerek gelen sinyalin en kuvvetli olduğu yönü buluruz. Radyo direction finder, gemilerde ve bilhassa uçaklarda kullanılmaya başladı. Düşünebiliyor musun daha önce okyanus üzerinde solo uçan Sir Francis Chitchester uçağın penceresinden sextantla rasat yaparak mevki koyuyordu. Uçaklar yaklaştıklarında hava limanlarının radyo sinyallerine kilitleniyorlardı.1921’de ilk Radyo Beacon (radyo sinyali veren şamandıra) hizmete girdi. Zamanla kıyılardaki tehlikelere karşı denizcileri uyarmak için daha çok fenerler ve “beacon”lar yerleştirilmeye başlandı. Radyo beacon’lar görünmeyen deniz fenerleri gibiydi. II. Dünya Savaşı’nda her iki taraf da, hava ve deniz navigasyonunda RDF’i gayet geniş olarak kullandı. Gelen sinyaller AM yayını veya mors koduyla istasyonu belirten harfler şeklindeydi. AM yayını yapan radyo istasyonlarının menzili ne kadar uzun biliyoruz. 1980’lerde Kelebek gibi bir teknede kullanılabilecek kadar küçülmüştü, 30×30 cm. AM radyo istasyonlarına da odaklanıyordu, ABD kıyısındaki sinyal kalabalığında istasyonun nerede olduğunu bilmezsen bir işe yaramaz ama Karayip’e ilk seyrimde Porto Rico ve sonra St. Martin yolunda, Anegada pasajında adaları bulmamda faydalıydı. İstasyon adanın garanti en büyük yerleşimindedir. Echo Sounder – 1914 (acoustic navigation): 27 Nisan 1914’te Kuzey Atlantik’te kıç güvertesindeki davul kadar büyük “oscillator” (titreşim sağlayarak ses yapan alet, kabaca hoparlör gibi) ile denemeye çıkan Miami’nin kaptanı denizin üstünde 40m yükselen buzdağına yaklaşınca gemi düdüğünü çaldı. Mr. Fessenden ve bir mühendis küpeşteye yaslanmış pür dikkat osilatör’ün gönderdiği sese ekoyu dinliyordu. Ama siste görünmez olan buz duvarı sessizliğini korudu. Bu sefer osilatör’ü buzlu denize 10 feet’e indirdiler. Sesi kullanarak buzu görebilecekler miydi? Fessenden kronometreyi tuttu. Bir, iki, üç, gönderdikleri “ping” saniyede 4.800 feet hızla iceberg’e çarpıp bir saniyeden biraz fazla zamanda oscillator’e döndü. Günümüzün en değerli cihazlarından biri, Sonar‘ın doğumuna şahit oluyorlardı. Savaşta denizaltıların kabuklarında “ping”lenen ekolar bizim salmamızı dipten uzak tutan en önemli yardımız olmaya bu koca osilatörden başladı.
Decca: II. Dünya Savaşı’nda Müttefikler’in çıkarma noktalarına hassas mevki koyacak bir sisteme ihtiyacı vardı. Decca, keza Loran-C aynı maksatla geliştirildi.
Zaten bütün navigasyon sistemlerindeki aşamalar savaşta karşı tarafa üstünlük sağlamak için Deniz Kuvvetleri tarafından geliştirildi, daha sonra sivil kullanımlara açıldı. Decca, Omega ve Loran-C birbirlerine benzeyen, hiperbolik alçak frekanslı radyo navigasyon sistemleri. “Multilateration” çok yanlı olarak da biliniyor. Sizi “mambo cambo” teknik kelimelere boğmadan, çoğunuzun dümen dolabını süsleyen chart ploter üzerinde dolaşan küçük gemiciğin oraya gelene kadar geçirdiği aşamalara kısaca bakalım. Bu lokal navigasyon sistemleri, savaş sonrası, gemiler ve uçaklar tarafından yaygın olarak kullanıldı. Kuzey Denizi’ndeki petrol platformlarında kapalı havada çalışan helikopterler için idealdi.
Omega – 1968: Amerikan bahriyesi tarafından geliştirilen Omega, ilk gerçek global radyo navigasyon sistemi oldu. 1968 yılında sistem, ABD ve altı partner devlet tarafından, sadece 8 transmitter ile, 4 mil hatayla (O devir için çok güzel bir doğruluk) mevki koyabiliyordu. Sistemin amacı nükleer bombardıman uçaklarının Kuzey Kutbu üzerinden Rusya’ya sefer yapabilmeleri içindi. Daha sonra denizaltıların da okyanuslardaki seyirlerinde her yerde mevki koyabileceği anlaşıldı. GPS’in başarısı ile Omega’nın kullanışı artık operasyon masrafına değmeyeceğinden 30 Eylül 1997’de istasyonlar operasyonlarını durdurdu.
LORAN (Long RAnge Navigasyon) – 1942: 18 Kasım 1940’da Mr. Alfred L. Loomis’in elektronik sinyallerin havada yayılmasına dayanarak bir navigasyon sistemi oluşturma düşüncesinden, 1942’de ABD’nin en ünlü teknik üniversitesi (MIT) Massachusetts Institute of Technology Radyasyon laboratuvarında LORAN (long range navigasyon sistemi) doğdu. Aynı yılın Kasım ayında, ilk LORAN sistemi Chesapeake Capes ve Nova Scotia arasında dört istasyonla faaliyete geçti. Önce LORAN A ardından LORAN B sonunda onlardan daha uzun menzili olan LORAN C gelişti.
Çalışma prensibi, kıyıda bir “master” (ana) ve beacon/şamandıralar üzerinde “slave” (yardımcı) istasyonlardan yayınlanan güçlü radyo sinyallerinden uzaklığımızı ölçmekti. Zaten ne cins navigasyon olursa olsun ana prensip belirli olan “o” noktadan mesafemizi bulmaya dayanır. İlk zamanlar bilgisayarlar henüz gelişme sürecindeydi, navigatörler radyo sinyallerini yorumlamak için bayağı usta olmak zorundaydı. (ABD’de normal deniz haritaları üzerine enlem boylam gibi bu istasyonların eğrileri, basılarak yapılan LORAN haritalarını kullanıyorduk. Cihazımız bize Lat, Long yerine o eğrilerin 6-7 rakamlı kimliğini verirdi. Birbirine dike yakın üç istasyondan altığımız LOP (pozisyon çizgilerini) küçük bir cetvel yardımıyla orantılı kesiştirerek fix bulurduk. Doğruluğu başta 0.10- 0.25 nm kadardı ama en güzel özelliği, “tekrarlayabilmesi” 18-91 metreye kadar doğru olabilmesiydi. (Benim tecrübeme göre, 10-20m arasıydı. New York’ta ıstakozcu arkadaşlar sepetleri attıklarında cihaza tıklarlar. Ertesi sabah ekranda tıkladıkları noktalardan toplarlardı. Çok ilginç 1993’te Türkiye’ye dönerken bir Finli denizci evindeki müze için benim nesli tükenmiş LORAN’ı satın aldı.)
UYDU NAVİGASYONU
SATNAV (SATtelite NAVigasyon) – 1962: 1957’de Sovyetler Birliği, ilk insan yapısı uydu, Sputnik’i uzaya yolladı. John Hopkins Üniversitesi fizik laboratuvarında Spunik’in “doppler shift” ile, (kabaca her tür sinyalin yaklaştıkça kuvvetlenmesi, uzaklaştıkça zayıflamasından mevki bulmak) ardından atılan Sputnik II ve Explorer uydularının pozisyonunu yerden takip edebiliyorlardı. Durumu tersine çevirip, uydudan bizim pozisyonumuzu nasıl bulabiliriz düşüncesi üzerinde çalıştılar. Bu beyin jimnastiğinden TRANSIT uydu navigasyon sistemi doğdu. 1960’ta ilk uydu, polar orbit’e (kutuplar yörüngesine) oturtuldu. 1962’de navigatörlerin yedi uydu ile faaliyete geçen sistemden aldığı bilgiyle 80 feet’e yakın hassasiyetle mevki koyması bekleniyordu.
Navigatör tekrar gök cisimlerinden yolunu bulmaya başladı, yalnız iki büyük farkla: 1. Gök cismini de kendi yarattı. 2. Artık navigatör mevkiini hesaplamıyor, yukarıda dünyanın etrafında dönenler nerede olduğunu küsuratına kadar veriyordu. Ona mevkiini haritasına doğru plot etmesi kaldı. Navigasyonda sanat yerini ilme bırakıyordu. Delikli demir çıkmıştı. (1980’lerde Decadence yatında dünyayı dolaşma hazırlıklarımızda, açık denizlerde hassas navigasyon yapabilmek için sextant’tan daha güvenebileceğim global kapsamı olan bir cihaz araştırmamda uydudan gelen sinyallerden mevki koyan SATNAV cihazıyla ilk defa el sıkıştım. Kelebek’le dolaşırken de, güney yarım kürede 4-6 saate kadar uzanan aralıkla Fix verse de başarılıydı.)
Radar (“RAdio Detection A Ranging”) navigasyonu – Nisan 1937: 1922’de U.S. Naval Research Laboratory, Washington D.C.’de Potomac nehrinin bir kıyısına radyo verici, karşı kıyısına da alıcı yerleştirdi. Hesapta olmayan bir gemi aradan geçince, gelen sinyallerde dalgalanma ve güç değişikliğine sebep olduğunu gördüler, ama daha ileri incelemediler. 1930’da bu sefer bir uçağın sinyalin içinden uçmasıyla aynı dalgalanma olunca, radyo dalgalarının çarpmasıyla hedefin tespit edileceği tekrar keşfedildi.
Şimdi üstünden gelinecek şey nasıl bir antenin bu sinyalleri hem verici hem alıcı yapabileceğiydi. II. Dünya Savaşı’nın ayak sesleri yaklaşırken bütün devletler var güçleriyle radarı geliştirmeye çalışıyordu. Radar ilk defa Nisan 1937’de prototip olarak USS Leary’ye monte edildi. Almanya bir adım ilerideyken savaşı zaferle bitirdiklerini düşünerek 1940’ta çalışmaları bıraktı. Uyandıklarında iş işten geçmişti. Kara kuvvetlerinin geliştirdiği bir radar Pearl Harbour Baskını’nda Japon uçaklarını tespit etti fakat ne yazık ki önemi anlaşıldığında bombalar düşüyordu. II. Dünya Savaşı yıllarında ne büyük bir önemi olduğunu yeterince vurgulayamam. İncelemenize değer, özellikle Pasifik savaşları. Savaş sonrası microwave radar magnetronla geliştirildi. Digital çağda radarlarda muazzam ilerleme kaydedildi hava radarları 2000 nm’den uçakları izliyor, güdümlü füzeleri, trafik polis radarları da sürat yapanları takip edebiliyor. Radarın çalışma prensibi basitçe; gönderdiği radyo sinyallerinin çarptığı hedeften gelen ekolarla yansıtan cismin mesafesini ölçmesidir. Aynı derinlik aletimiz “Echo sounder”ın ses sinyallerini kullanması gibi. Uydulardan gelen hediye GPS, navigatörün en yakın arkadaşı olarak 1 numaraya yerleşse de, benim favorim radarı ayrı bir yere koyarım. Gerçi bugün gözü kapalı, GPS’e güvenip navigasyon yapabilirsin ama Navionics amca senin önündeki balık çiftliğini, ışıksız avlanan balıkçıyı, denize düşmüş serseri konteyneri, haritada henüz update edilmemiş bir yeni mendireği göstermez. Radarı sadece tehlikeleri gösteren bir cihaz olarak görmek haksızlık olur. Bence en faydalı özelliği, triangulasyon’a gerek olmadan tek bir hedefe olan “distance” mesafemiz ve “bearing” açımızla pozisyonumuzu gösterir. Gece, sis, fırtına demeden, varışlarımızda yüzde 100’e yakın doğrulukla navigasyon yapmamızı sağlar. Radar operatörü ekranda gördüklerini doğru yorumlamak için sanatını kullanmak zorundadır, gemilerde çalışanlar bu yüzden kurs görürler. Güney Afrika yolunda, Mozambik Kanalı’nda, Maputo limanına 30mn uzaktayız. Ve de gece! Felaket bir fırtınadan yeni çıktık, sonra daha da kötü bir ikincisi gelecek. Bu havada ve akıntıda “hove to” yaparak sabahı bekleyemeyiz. Mozambik’te iç savaş olduğundan durmak niyetim olmasa da Allahtan bir arkadaştan ne olur ne olmaz diye liman ağzının A4 kâğıda kopyasını almıştım. Limanın içinde olduğu nehrin sığlıkları ve resifler kıyıdan 25 mil açıkta başlıyor. Bizim küçük radarın menzili 12nm, kıyıdan kerteriz alamıyoruz. Fairway buoy denilen gemileri limana yönlendiren ilk şamandırayı bulmam lazım. Burada aslan radarımız sahneye çıkıyor. İlk şamandıra bir RACON (rakon). (Radar her “sweep” taradığında Raconlar bir nokta yerine ekrana büyük bir mors harfi koyar). Annette dümende ben aşağıda radarda, nokta çizgi (A veya N harfi, nereden baktığına bağlı) veren Racon’dan mesafe ve “bearing” açıyla pozisyonumuzu takip ederek, 6 saatte, süper dümenci Annette’i yönlendirerek liman giriş kanalına ulaştık. Zavallı Annette 6 saat dümene esir oldu. Radar dalgaları sert yüzeylere çarptığında bir bilardo topu gibi yansır, liman kanalındaki şamandıraların üstündeki radar reflektörlerine dikkat edersek, yüzeylerin sanki su toplamak için yerleştirildiğini görürüz. Yani dalga 45° yüzeye çarpıp, 90° yansıyınca, çarptığı ikinci yüzeyden de 90° dönüp bize en kuvvetli olarak döner. (Teknelerde yanlış kullanıldığını görüyorum. Bir reflektörünüz yoksa bir plastik şişeye hafif buruşturulan alüminyum folyo koyup asarsanız işe yarar.) Dik, kayalık bir sahil, çelik bir gemi, tahta bir kayıktan daha kuvvetli eko verir.
Namibia kıyılarının lakabı “Skeleton Coast” (İskelet Kıyısı), soğuk Benguela Akıntısı’ndan devamlı sis altındaki, çöl olan kıyıya vurmuş çürüyen gemi leşlerindendir. Gemilerin karaya vurma nedeni, radarlarının tamamen çöl olan alçak kıyıdaki kumdan eko almayıp biraz içerideki dağlardan gelen ekoyu kıyı zannetmelerindendir. Radar operatörü “tüne” ederken ekrandaki ekoları, “sea clutter” dalgalardan gelen, “rain clutter” yağmurdan gelen ekoları kararında alçaltarak arka planda asıl görmek istediği nesneleri kaybetmemeye çalışır. Radar gökte oluşan “squall” yağmur sağanaklarının mesafesini, gidiş yönünü ve su altındaki resif canavarının dişlerinde kırılan dalgaların hattını da gösterir dikkatli bakarsanız. Maldivler’e iniyoruz, deniz ayna gibi, denize girip serinlerken ufukta squal bulutları toplanıyor, rüzgâr vardır bulutların altında. Motora uyan bakalım deyip, rotamızı üstüne çevirdik. Yaklaştıkça griler simsiyaha, radar ekranındaki dağınık ekolar yemyeşile dönünce istediğimizden fazla rüzgâr olacak. Bu sefer erkekliğin onda dokuzuna katılıp squalın rotasından kaçıyoruz. Daha doğrusu kaçmaya çalışıyoruz. Rüzgâr duasına çıkacakken camadan, derken ana yelken aşağı, squal bizi biraz tokatlayıp geçti. Öfff derken, Radar bizi geçen squal’ın ileride dönüp tekrar üzerimize geldiğini gösteriyor. Biz kaçtıkça o kovaladı, aynı squal üç defa üstümüzden geçti. Annette’le radarın squal’ı cezbettiğini düşünmeye başladık ve radarı kapattık. (Herhalde çok uzun süre denizde kalmamızdan hayal gücümüzün saatte 120 km çalışmasındandır).
Şimdiye kadar maziden bahsettik, gelecek yazıda okyanusların kalabalıklaşmasında baş sorumlu GPS sistemine ve ileriye bakacağız. 1987’de ilk Pasifik geçişimde koca okyanusta 7-8, (Galapagos’ta demir yerinde 6 tekneydik) bilemedin aynı zamanda 10 tekne vardı. 2001 ikinci geçişte ise aynı zamanda 200 üzerinde belki 300 tekne GPS’in verdiği güvenceyle okyanus üzerindeydi.☸

“The captain measures the height of the sun. Woodcut engraving after a drawing by Heinrich Egersdorfer (German painter, 1853 – 1915), published in 1877.”

Detail of a luxury white yacht with navigation equipment, radar and antennas on blue sky, superstructure


